
Har du läst om hur man hittar pythagoreiska tripplar i cirklar? I artikelserien träffar vi på många cirklar som har några punkter med heltalskoordinater på periferin.
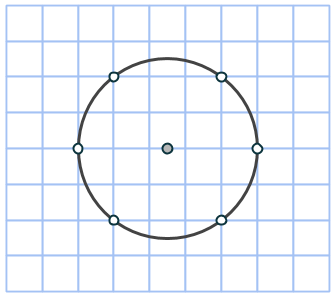
Men oftast är antalet punkter delbart med 4 (cirkeln är centralsymmetrisk i förhållande till koordinatsystemet, eftersom mittpunkten ligger i vårt fall antingen i en heltalsnod eller i mitten av en ruta). Men kan vi hitta en cirkel med ett annat antal punkter på periferin, t.ex. 6?
Vi vill alltså ta reda på för vilka n det går att hitta en cirkel som går igenom exakt n heltalspunkter.
Går det att hitta en cirkel med en heltalsnod på periferin? Så klart går det, vi kan t.ex. ta en cirkel med en väldigt liten radie som går igenom en godtycklig punkt.
Två heltalsnoder på periferin då? Ja, vi kan ju skapa cirklar som inte är rotationssymmetriska, men däremot spegelsymmetriska, genom att välja att ha mittpunkten på cirkeln i (0, 0.5) till exempel eller egentligen var som helst mellan två närliggande heltalsnoder. Tar vi radien lika med 0.5 så är vi garanterade att inga andra heltalsnoder än (0,0) och (0,1) kommer med på cirkelns periferi.
Hur gör vi med 3 punkter på periferin? Cirkeln får nu varken vara spegelsymmetrisk eller rotationssymmetrisk med avseende på heltalsnoderna (om två periferipunkter ligger strikt på vänstra/högra halvan av cirkeln). Således måste vi placera mittpunkten varken i en heltalspunkt eller i en ”halvtalspunkt”. Under några antaganden kan vi försöka hitta en cirkel med två heltalspunkter som befinner sig på samma vertikala linje. Vi antar att cirkelns horisontella diameter ligger på linjen y=0.
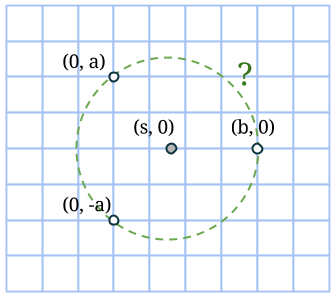
Koordinaterna för mittpunkten är då (s, 0) och för heltalsperiferipunkterna (0, a), (0, -a) samt (b, 0). Då får vi likhet av två radier (i kvadrat):
s2 + a2 = (b – s)2
s2 + a2 = b2 – 2bs + s2
a2 = b2 – 2bs
Både a och b är positiva heltal, medan s är ett positivt reellt tal (förmodligen större än 1). Därför måste b vara åtminstone 3 och vi prövar b = 3.
Då måste a2 = 9 – 6s. Tar vi a = 1 får vi s = 4/3 vilket ger oss cirkeln:
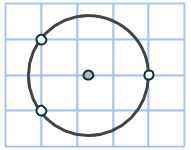
Denna har exakt 3 punkter på periferin! Men hur gör man i det allmänna fallet? Kan man alltid få relativt snygga cirklar, det vill säga där punkterna ligger i par på respektive vertikallinjer? Det visar sig att man kan det med hjälp av Schinzels sats!
Schinzels sats
Det existerar en cirkel med exakt n heltalspunkter på periferin för varje naturligt tal n.
För jämna n=2k har Schinzels cirkel ekvationen
^2 + y^2 = \frac{1}{4}5^{k-1}")
Medan för udda n=2k+1 har Schinzels cirkel ekvationen
^2 + y^2 = \frac{1}{9}5^{2k}")
Testa till exempel hur cirkeln med exakt 7 heltalspunkter på periferin ser ut!
Schinzels cirklar är inte nödvändigtvis de minsta med den egenskapen, men de är i alla fall snygga på sättet beskrivet innan, nämligen att heltalspunkterna på periferin förekommer i par, vilket kan ses från ekvationen (mittpunkten ligger på en horisontell heltalslinje).
Kan du bevisa att Schinzels cirklar uppfyller egenskaperna som det påstås i satsen? Helt trivialt är det ju inte att bevisa.
Tack Sture Sjöstedt för frågeformuleringen, samt länkar och tips!

 vektor), så kommer resultatet vara samma vektor (exakt samma geometriskt objekt), men koordinaterna kommer ändra sig. De kommer att vara uttryckta i basen c.
vektor), så kommer resultatet vara samma vektor (exakt samma geometriskt objekt), men koordinaterna kommer ändra sig. De kommer att vara uttryckta i basen c.




") ,
, ") ,
, ") ,
, ") ,
, ") ,
, ")
") ,
, ") ,
, ") ,
, ") ,
, ") ,
, ")