
De flesta matematik- och ingenjörsstudenter läser någon form av linjär algebra. Det är ett högst rimlig inslag i deras utbildning – vilken vuxen människa räknar inte med matriser :)?
Just beräkningar är dessutom det studenterna måste lära sig först. Efter att de behärskat teknikerna som Gauss-elimination och matrismultiplikation är det dags för nästa steg: räkna med olika baser.
Jag har som lärare på kursen Linjär algebra II fått överlägset mest frågor om avsnittet som handlar om transformationsmatriser. De frågorna var jag också sämst på att besvara, eftersom man alltid är tvungen att hålla tungan rätt i mun med transformationsmatriser. Olika beteckningar i olika böcker förbättrar inte situationen.
Så vad är en transformationsmatris?
Med en transformationsmatris från basen b till basen c menar jag en matris som omvandlar vektorer, uttryckta i basen b, till likadana vektorer, men uttryckta i basen c.
Eller snarare så här: tar man en vektor (föreställ er ett geometriskt objekt) och skriver upp dess koordinater i basen b och sedan multiplicerar med transformationsmatrisen från vänster (det vill säga tar produkten matris 
Därför kallas transformationsmatrisen också basbytesmatrisen. Det den gör är att byta vilken bas som för tillfället är den aktuella, i vilken bas vi just nu räknar saker.
Vissa begrepp kanske känns oklara i förklaringen ovan. Vi reder ut dem!
Vadå baser?
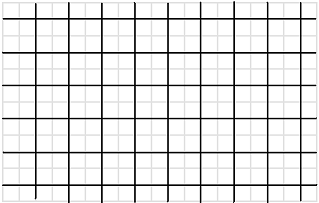
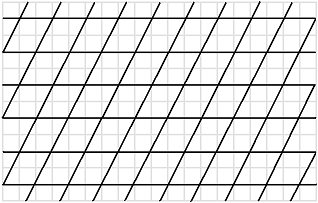
En bas kan ses som en sorts koordinatsystem. Om vi arbetar på det tvådimensionella planet så kan vi rita flera olika koordinatlinjer:
 |
 |
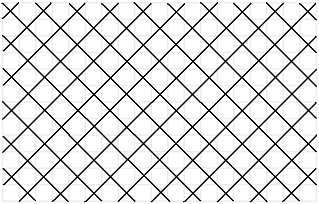 |
Som vi ser bestäms hela bilden alltid av två sorts linjer. Det är riktningarna på linjerna som är viktiga.
På samma sätt bestämmer två vektorer en bas i planet. De skall vara riktade åt olika håll (inte parallella). En bas är alltså ett par av vektorer. (Men i rum med högre dimension ska en bas bestå av fler vektorer, antalet är lika med dimensionen.)
Så exempel på baser (som vi ska jobba med) är:
|
|
|
|



Om vi lägger på koordinater på rutnätet kan vi läsa av vad de här basvektorerna har för koordinater (i standardbasen):

Nämligen ")
")
")
")
")
")
Eller, skrivna på kollonform: ")
")
")
")
")
")
Det är egentligen ingen väsentlig skillnad mellan radform och kolonnform, men oftast skriver man vektorerna på kolonnform. Om man gör det, så skall matrisen skrivas till vänster om vektorn vid multiplikation.
I nästa del reder vi ut hur man beräknar och skriver vektorer i olika baser.